医械创新资讯


前言导读
手术机器人是一种先进的医疗设备,借助微创伤手术及相关底层技术的发展而发明。手术机器人被用于在高于人类能力的微创伤手术领域中实现高于人类能力的对手术器械的精准操控。手术机器人通常由手术控制台、配备机械臂的手术车及视像系统组成。外科医生坐在手术控制台,观看由放置在患者体内腔镜传输的手术区域三维影像,并操控机械臂的移动,以及该机械臂附带的手术器械及腔镜。机械臂模拟人类的手臂,为外科医生提供一系列模拟人体手腕的动作,同时过滤人手本身的震颤。
机器人手术系统是集多项现代高科技手段于一体的综合体,其用途广泛,在临床上外科上有大量的应用。外科医生可以远离手术台操纵机器进行手术,完全不同于传统的手术概念,在世界微创外科领域是当之无愧的革命性外科手术工具。
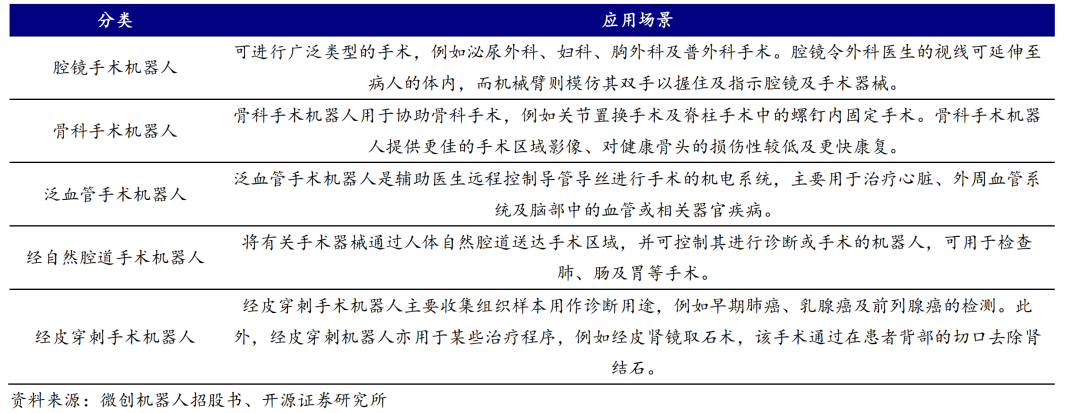
经过数十年发展,手术机器人现在主要用于五个快速增长的主要外科领域,其中的骨科、介入手术机器人是及其重要的一个版块。
手术机器人市场概览
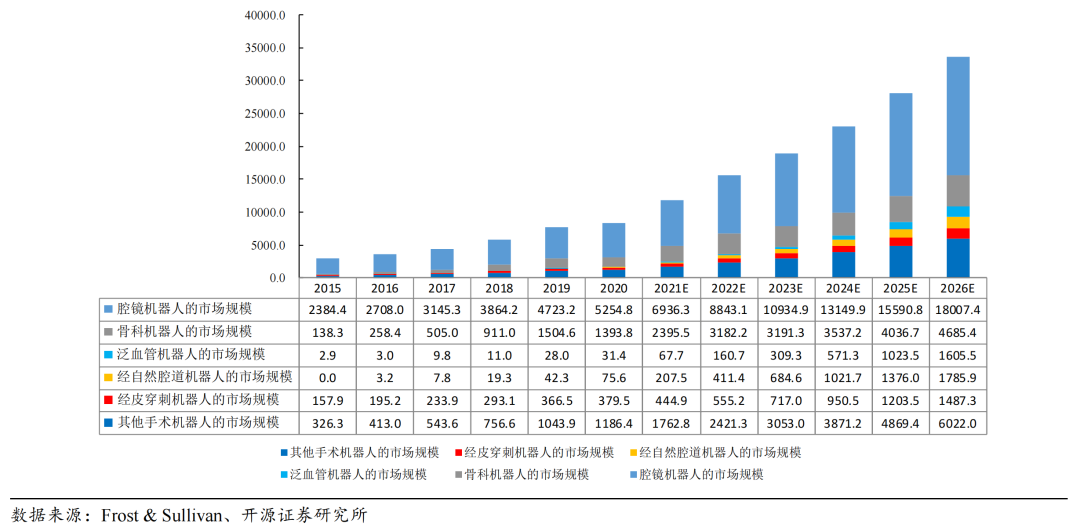
当前,随着人工智能、物联网等新科技的快速渗透,医疗健康正在与机器人全面融合,引领外科技术大变革。手术机器人行业迎来快速发展,赛道火热,备受资本青睐。
术锐手术机器人概览
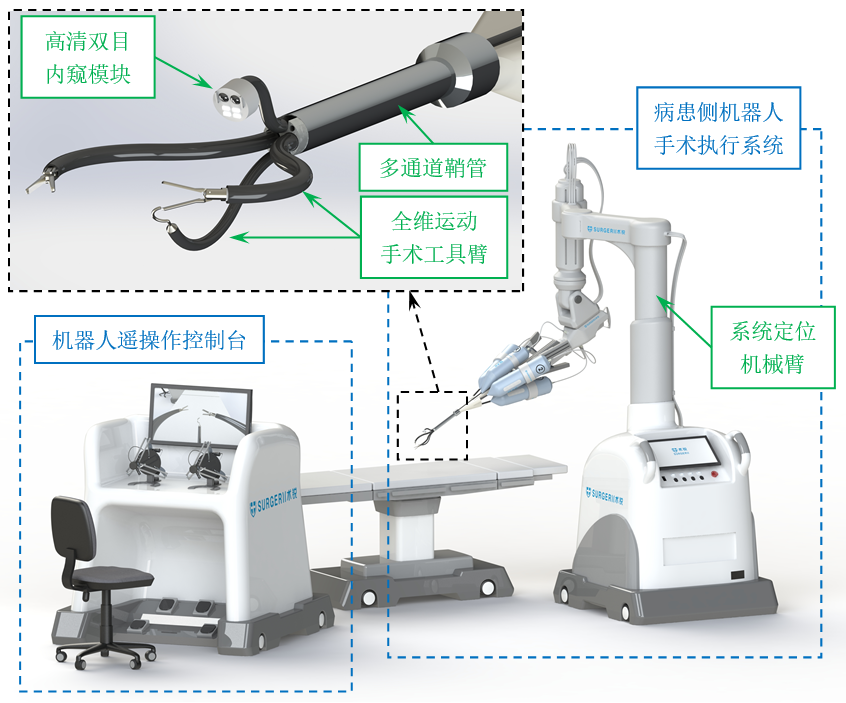
术锐手术机器人,依托新一代可形变连续体手术机器人核心原创关键技术,由主控台车和手术台车组成;术者操控主控台车上的主操作器,对手术台车上装载的可形变手术工具和3D高清电子内窥镜进行遥操作控制,可完成多科室的单孔微创手术治疗。整机通过了涉及数十个中外相关标准、数百个检测项的严格检验,是首台通过的创新医疗器械特别审查程序的单孔机器人,现已于泌尿外科、妇外科、普外科、胸外科等诸多科室开展临床试验。
术锐手术机器人仅通过一个皮肤切口上置入一多通道鞘管,递送一支3D电子高清内窥镜和3支手术工具,完成疾病极尽微创的手术治疗。已完成亚洲首例的纯单孔前列腺癌根治术和肾癌肾部分切除术,也完成了世界首例的腹膜外肾上腺肿瘤切除术。在目前的临床试验中,术锐腔镜手术机器人表现优异,以单孔方式对多种病症执行手术,对病人创伤进一步减小,手术流畅、动作精准,术后病人均恢复良好。

术锐手术工具和3D电子内窥镜均采用了自主研发且拥有自主核心技术的“可形变对偶连续体机构”关键技术。手术工具负载良好、可靠性高、操控精准、运动灵活。3D高清电子内窥镜采用八方向双构节体内翻展的设计,视野调整范围大、成像清晰细腻、色彩还原性优异。
主从范式是医生操控主控制器,使手术工具末端执行器复现操作者的手部运动的一种控制模式。针对蛇形手术工具的形变运动特性,术锐自主研发了基于“串联结构体—可形变连续体”异构遥操作核心算法和控制系统,实现了精准直观、得心应手的操作体验。在3D电子内窥镜为术者提供的数倍放大的三维立体沉浸式视场中,手术环境一览无余、操作可细致入微。术者还可为主从运动设置不同的行程映射比例,在必要时提高手术操作的精细程度。
术锐蛇形手术工具的臂体本身为可控形变结构,可由任意弯曲的入路通道进入人体且其运动和负载能力不受影响。此种特性使得术锐的手术和内窥镜工具能挂载于四支定位臂上。四支定位臂的多种摆位和协同运动,使得术锐手术机器人不仅能支持多象限手术,还能兼顾单孔、多孔和混合孔多种术式,并为将来实现经自然腔道手术奠定了基础。

术锐手术机器人手术工具采用高冗余的结构骨布置,任一结构骨断裂均不影响其运动能力。系统设计基于双环路独立硬件实现全状态安全监控、基于全流程风险预警实现全时段运动监控,集成多层次的安全监测机制和应急过程控制预案,确保手术实施各阶段的安全。不仅如此,手术工具的可弯转臂体在病患体内即可实现术中所需的运动能力,体外定位臂在手术操作过程中保持不动,完全避免了体外机械臂的术中碰撞风险,进一步提升了系统的术中安全。
术锐手术机器人技术方案简析
在单孔微创手术中,一支内窥镜和两到三支手术工具须经同一皮肤切口进入病患体腔。内窥镜须集成照明功能并实现术野的灵活调整,而手术工具须兼顾运动的范围、精准性、灵巧度以及足够的力度。相比于多孔微创手术,单孔腔镜手术器械的排布更加拥挤、内窥镜及手术工具的驱动传动布置更加困难,还要保证临床使用的功能性和可靠性,因此,单孔腔镜手术机器人的研发面临着重大的技术挑战。
绝大多数单孔腔镜手术机器人采用的设计范式是定位机械臂配合具备全维运动能力的手术工具。如下图所示,定位机械臂在术中操作时静止,其作用是把递送内窥镜和手术工具的多通道鞘管举抬至所需位姿。内窥镜和手术工具可展开为工作姿态进行手术。
在这种范式下,内窥镜和手术工具通过多通道单孔鞘套进入病患体腔,驱动手术工具实现大范围、大负载、高可靠的运动成为最关键的技术。
为实现安全有效的单孔腔镜机器人手术,学术界和产业界尝试了各种技术途径,包括钢丝驱动、电机内置驱动、空间连杆驱动、远心运动机构等。但这些技术途径都有着其自身的缺陷,限制了其在临床手术中的应用。
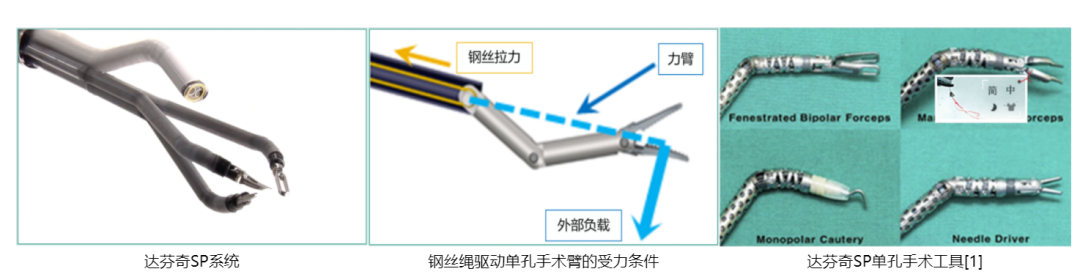
钢丝绳是最常见的驱动方式。以达芬奇SP单孔手术工具为例,其肩部关节的钢丝绳驱动采用滑轮导向,其肘部关节和腕关节则采用钢丝绳直接驱动。当在手术操作过程中,外负载作用于工具末端的执行器上时,外负载对肩部关节的力臂较长,较小负载即会产生较大负载力矩;而肩部关节滑轮的半径(即驱动力臂)较小,驱动绳很大张紧力也只能产生较小力矩,因此该设计下手术工具负载能力较低。另一方面,受限于手术工具臂体的内部空间,其肘关节和腕关节无法布置导向滑轮,致使钢丝绳受到的摩擦较大,运动磨损也较显著。
电机内置型驱动,采用内置于多关节手术臂的小型伺服电机驱动,通过齿轮取代钢丝绳的传动,提高机械臂的负载能力。意大利Ekymed SpA公司的SPRINT系统、美国Virtual Incision公司的MIRA系统(前身为美国内布拉斯加-林肯大学的SISR系统)、香港NISI公司的NSRS系统等主要采用这样的设计。该设计采用电机直径通常需要超过10mm,以保证足够的负载,加上必要的减速传动机构,往往造成手术执行臂粗大;而由于电机内置、随机械臂进入体腔,手术臂的封装和消毒也是额外的技术挑战。
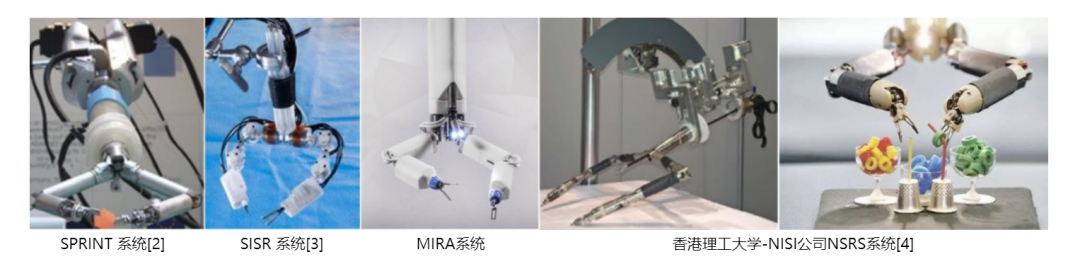
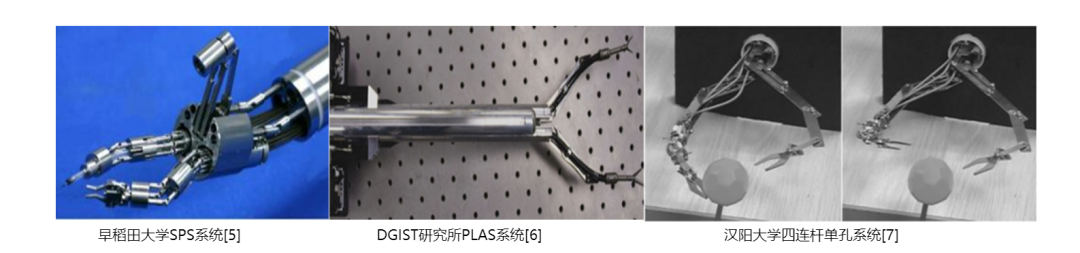
空间连杆型驱动,采用刚性连杆机构构成手术臂,其力学性能较好。但空间连杆机构的设计(包括传动和避免干涉等)具有较大的挑战,较难实现大范围全维运动能力,导致手术臂运动灵活性不足。此外,手术臂结构复杂、加工成本高,受销接关节尺寸等限制,难以小型化。因此,该技术主要在日本早稻田大学、韩国DGIST、韩国汉阳大学的单孔手术机器人研究中使用。
交叉式远心运动机构驱动,采用被动式软杆手术工具,配合刚性弧形中空鞘管的远心运动,实现手术工具在病患体内的运动。为实现单孔手术,所有手术工具均须交叉通过入腹口,因此在双侧手术工具前后运动时会产生手术工具的相互干涉。此外,该构型要求体外定位臂在术中摆动,而定位臂之间布置紧凑、有碰撞风险。韩国科学技术院的Apollon系统和直观外科用于达芬奇系统的Single-Site套件,采用此类技术。为配合刚性弧形中空鞘管,必须采用特殊的柔杆Endowrist®工具,由于该工具有着腕关节自由度不足的缺陷,因此该技术在临床的应用非常受局限。

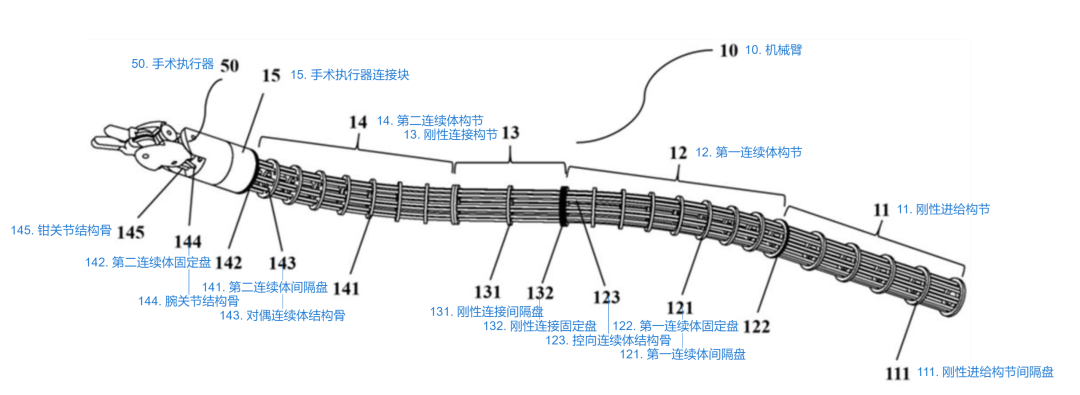
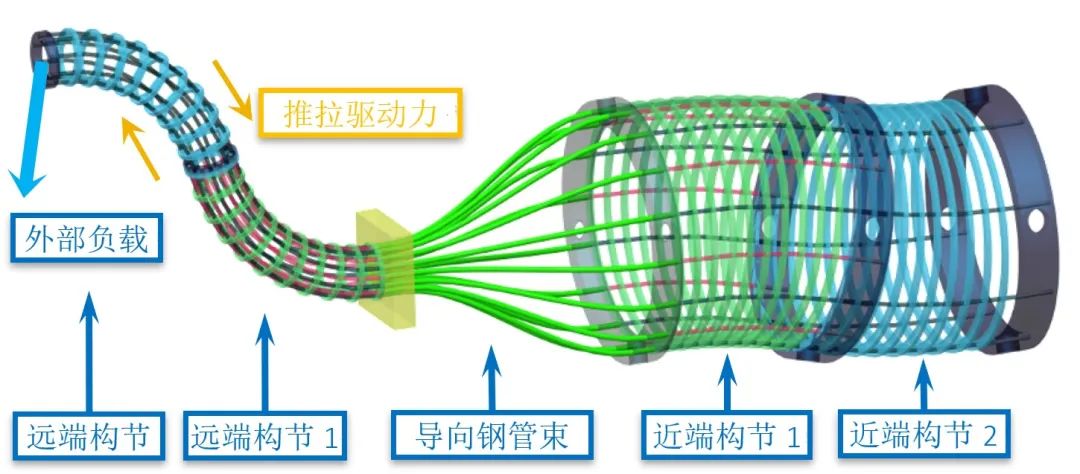
革命性的可形变对偶连续体技术,术锐的手术工具和3D电子内窥镜的蛇形臂体均采用了原创自主的核心技术“可形变对偶连续体机构”设计。如图所示,“可形变对偶连续体机构”由近端构节、导向钢管束以及远端构节组成,超弹性镍钛合金细杆作为结构骨从头至尾贯穿。近端构节的弯转,会带来十余根结构骨的推拉运动,这些推拉运动传递到远端构节,协同将远端构节向相反的方向弯转。采用双构节“可形变对偶连续体机构”设计的手术工具,可将近端构节的驱动电机布置在病人体外,而病人体内的远端构节可在十余根结构骨协同推拉下实现双构节、八方向弯转的灵活运动。
“可形变对偶连续体机构”具有诸多优势:十余根结构骨可同时承受推力和拉力,手术工具蛇形臂体的负载能力显著提高;结构骨冗余布置,其中一根断裂,对手术工具的整体性能几乎没有影响,安全性极高;蛇形臂体具有连续弯曲形变特性,可轻易通过复杂形状腔道,灵活满足单孔手术下各种运动需要。
与传统的多关节刚性机器人结构不同,“对偶连续体机构”力学性质复杂、形变模态多样;为实现精准的运动控制,建模时须考虑多种非线性力学的耦合效应,还需满足实时高效计算的运算要求,是门槛极高的系统化关键技术。针对“对偶连续体机构”的运动控制难点,术锐经过数年的技术探索和积淀,独创了弹动力学复合模型,兼顾了耦合效应的补偿机制和轻量解析的运算结构,使其运动控制性能达到国际领先水平。“对偶连续体机构”控制算法精准驾驭蛇形手术臂的运动控制,为医生提供精细流畅的操作体验。
关键技术的工程验证,为验证技术的可行性,术锐自主研发了“单多孔模块化腔镜手术机器人系统”工程样机。系统由遥操作控制台、手术执行系统和手术设备台车三部分组成,其中手术执行系统包含多架模块化定位臂,每架定位臂上可挂载一支手术工具或内窥镜。通过定位臂与鞘管的灵活布置,手术执行系统可以兼容多孔和单孔两种构型:在多孔构型下,每架定位臂与一个标准的直鞘管连接,分别经各个皮肤切口将手术工具和内窥镜送至病患体内;在单孔构型下,所有定位臂和一个多腔道的鞘管相连,手术工具与内窥镜通过弯曲的多通道鞘管腔道后进入病患体内并展开至工作姿态。

遥操作控制台配备了立体显示器、触摸显示器、踏板组和两台6自由度力交互输入设备,术者通过遥操作控制台可实现直观的手术操作以及对手术流程和设备状态的监控与管理。手术设备台车配备了状态显示器,并可置放冷光源、气腹机、高频能量发生器等设备。
手术过程中,主刀医生操纵控制台的两台力位交互输入设备,在立体三维视觉的引导下,对病患侧手术执行系统内的内窥镜和手术工具实施遥操作控制,实现组织剥离、电切、电凝、缝合等一系列腔内精准操作以及手术视野调整。
作为工程样机,该系统集成了术锐所有关键技术以及手术实施的基本功能,系统指标亦达到世界前列水平:手术工具具备全维六自由度运动能力及额外的手术执行器开合控制功能;内窥镜提供1080p高清立体视觉反馈。
该工程样机成功完成了数十例动物实验,涵盖泌尿外科、妇科、普外科、胸外科多种适应症,验证了关键技术“可变形对偶连续体机构”在单孔腔镜手术中的安全性和有效性。但与此同时,该模块化腔镜手术机器人样机系统也难以避免分体式手术机器人系统设计的典型不足,即占据手术床旁面积大、对临床流程干扰较多等。术锐在新一代手术机器人系统设计中进行了大刀阔斧的改进,用户可根据病患手术部位实现不同的定位臂协同摆位和调整,增强了智能自动化的手术流程管理。
专利简析
术锐机器人是一家医疗器械公司,致力于自主研发、生产和销售创新的腔镜手术机器人系统、配套手术工具及耗材。根据术锐机器人新闻稿介绍,该公司依托“对偶连续体机构”这一创新性设计,推出搭载镍钛合金蛇形手术臂的术锐单孔腔镜手术机器人,并于2020年获得中国国家药监局(NMPA)批准进入创新医疗器械特别审查程序(即“绿色通道”)。
术锐单孔腔镜手术机器人借助强力蛇形手术工具和沉浸式直观遥(直观遥感)操作,经典高难度单孔术式得以在主刀医生手中实现精准操作。据介绍,术锐单孔腔镜手术机器人具有手术切口更微创、操作更灵活、术中更稳定等优势,可应用于泌尿外科、妇科、普外科、胸外科、心外科等多个临床领域。| 公开/公告号 | CN109452976B | 申请日 | 2018-12-28 |
| 发明名称 | 一种柔性手术工具系统 | ||
| 解决的技术问题 | 本发明由于采取以上技术方案,其具有以下优点:1、本发明采用基于对偶连续体机构的机械臂和手术执行器为主体,该对偶连续体机构包括顺序关联的第一连续体构节、刚性连接构节和第二连续体构节,并配合以传动驱动单元,其中,传动驱动单元与刚性连接构节关联,同时传动驱动单元与手术执行器关联,因此通过传动驱动单元可以驱动对偶连续体机构向任意方向弯转,以及驱动手术执行器完成在第一平面内的旋转运动和/或在第二平面内的张合运动。2、本发明对偶连续体机构中的对偶连续体结构骨两端固结在第一连续体构节近端和第二连续体构节远端,对偶连续体结构骨在驱动过程中长度保持不变,因此第一连续体构节、刚性连接构节和第二连续体构节的总长度保持不变,当传动驱动单元驱动第一连续体构节向某一方向弯转,第二连续体构节的耦合运动也被唯一确定。3、本发明在对偶连续体机构的末端设置手术执行器,手术执行器控线一端与腕关节旋转体和/或钳关节旋转体连接,另一端通过转向滑轮与传动驱动单元连接,由此可以实现对手术执行器的腕关节旋转体和/或钳关节旋转体的控制。4、本发明的传动驱动单元采用双头螺杆、滑块作为直线运动机构,当驱动双头螺杆旋转时,与该双头螺杆配合的两滑块以相同的速度进行反向直线运动,从而带动与滑块连接的控向连续体结构骨、腕关节结构骨或钳关节结构骨受推或受拉,从而实现对偶连续体机构向任意方向发生弯转,以及手术执行器的腕关节旋转体和/或钳关节旋转体绕关节轴旋转。 | ||
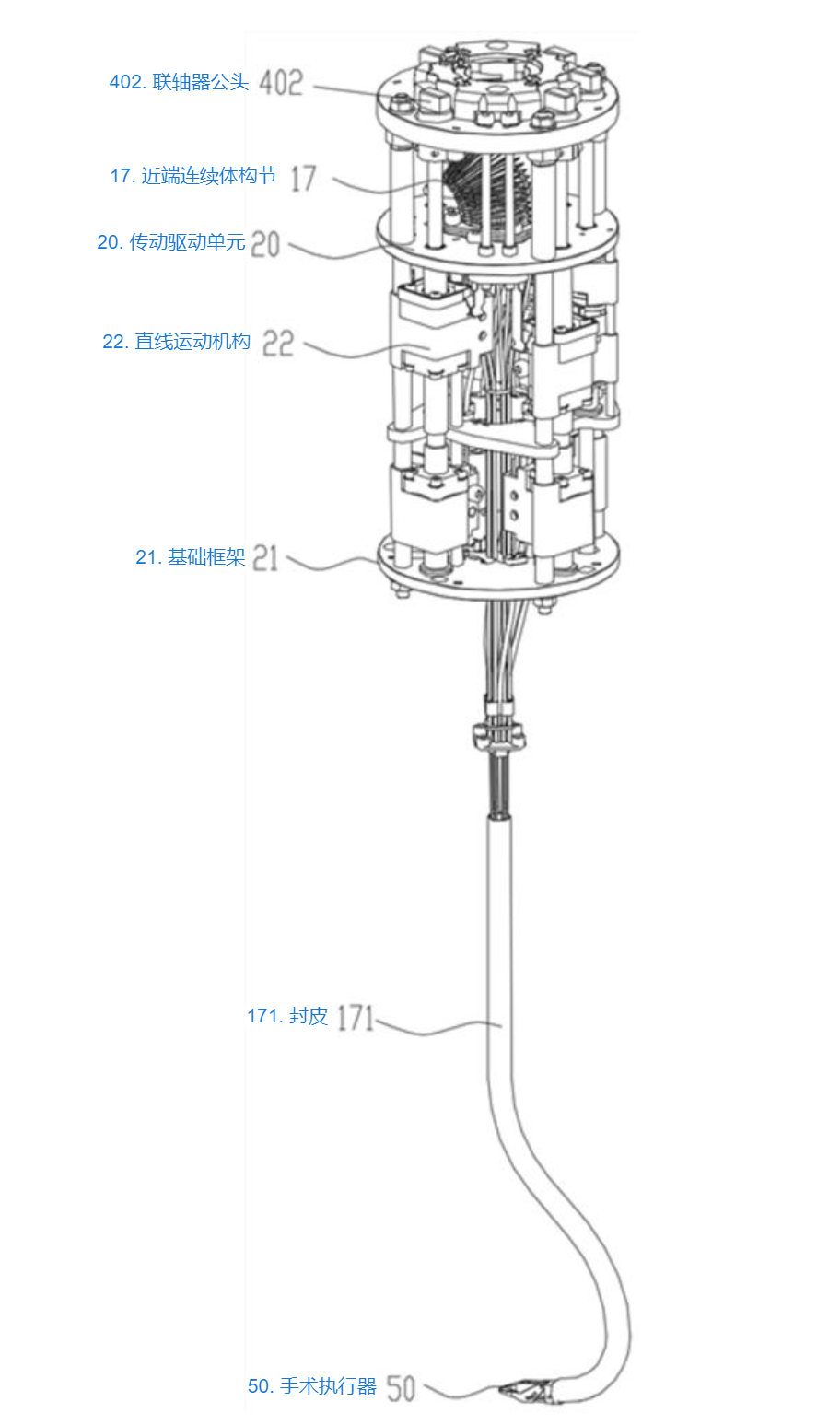
| 技术方案 | 本发明涉及一种柔性手术工具系统,包括:机械臂,机械臂包括第一连续体构节、刚性连接构节和第二连续体构节,第一连续体构节、刚性连接构节和第二连续体构节顺序关联以形成对偶连续体机构;手术执行器,连接在第二连续体构节的远端;传动驱动单元,分别与刚性连接构节和手术执行器关联,用于驱动第一连续体构节向任意方向弯转,进而耦合驱动第二连续体构节完成向相反的方向弯转,以及用于驱动手术执行器完成在第一平面内的旋转运动和/或在第二平面内的张合运动。本发明提供的柔性手术工具系统能够较好地应用于经人体自然腔道或经单一手术切口并且实施手术。 | ||
| 相关附图 |
|
||
| 公开/公告号 | CN110037795B | 申请日 | 2018-12-28 |
| 发明名称 | 一种双弯曲型柔性手术工具系统 | ||
| 解决的技术问题 | 本发明由于采取以上技术方案,其具有以下优点:1、本发明设置由第一连续体构节、刚性连接构节和第二连续体构节顺序关联的第一对偶连续体机构,同时在第一对偶连续体机构的远端设置第三连续体构节,第三连续体构节的结构骨通过第一对偶连续体机构与近端连续体构节连接以形成第二对偶连续体机构,并配合以传动驱动单元,传动驱动单元分别与刚性连接构节和近端连续体构节关联,或者第三连续体构节的结构骨直接与传动驱动单元关联,因此通过传动驱动单元可以驱动第一对偶连续体机构和第二对偶连续体机构/第三连续体构节向任意方向弯转。由此,第一对偶连续体机构和第二对偶连续体机构/第三连续体构节形成双弯曲型机械臂,增加了手术工具运动灵活性,扩展了手术工具的运动空间,能够使得在体外机械臂保持固定位置的状态下,提供手术工具在体内的足够大的覆盖范围并达到手术动作的精确控制,从而使手术工具的运动性能更加优越,并且有助于提高手术器械的运动性能,实现手术器械的小型化、量轻化。2、本发明的第一对偶连续体机构中的结构骨两端分别固结在第一连续体构节近端和第二连续体构节远端,该结构骨在驱动过程中长度保持不变,因此第一连续体构节、刚性连接构节和第二连续体构节的总长度保持不变,当传动驱动单元驱动第一连续体构节向某一方向弯转,第二连续体构节的耦合运动也被唯一确定。同样的,第二对偶连续体机构的结构骨/第三连续体构节的结构骨在驱动过程中长度也保持不变,当传动驱动单元驱动近端连续体构节向某一个方向弯曲,第三连续体构节的耦合运动也被唯一确定。3、本发明的传动驱动单元采用双头螺杆、滑块作为直线运动机构,当驱动双头螺杆旋转时,与该双头螺杆配合的两滑块以相同的速度进行反向直线运动,从而带动与滑块连接的控向连续体结构骨或近端连续体结构骨受推或受拉,从而实现第一或第二对偶连续体机构/第三连续体构节向任意方向发生弯转。 | ||
| 技术方案 | 本发明涉及一种双弯曲型柔性手术工具系统,包括:机械臂,机械臂包括第一连续体构节、刚性连接构节、第二连续体构节和第三连续体构节,第一连续体构节和第二连续体构节关联以形成第一对偶连续体机构;近端连续体构节,布置在第一连续体构节近端,并与布置在第二连续体构节远端的第三连续体构节关联以形成第二对偶连续体机构;传动驱动单元,分别与刚性连接构节和近端连续体构节关联,用于驱动第一连续体构节向任意方向弯转,进而耦合驱动第二连续体构节向相反的方向弯转,以及驱动近端连续体构节向任意方向弯转,进而耦合驱动第三连续体构节向相反的方向弯转。本发明能够较好地应用于经人体自然腔道或经单一手术切口并且实施手术。 | ||
| 相关附图 |
|
||
结语
诚如领域内人士共同认识的那样,手术机器人逐渐赢得市场追捧,站上了智能精细化发展、医保政策利好的快车道,全球以及国内各大手术机器人厂商也必会将达芬奇等先进机器人作为重要的标杆和对照,联动产学研医生多方力量,不断创新,推动中国手术机器人行业更智能化、精准化、微创化的发展,相关知识产权问题也必将会成为各大手术机器人厂商的研究重点课题,后续相关产品的的研发和专利事务值得持续关注。