


医械创新资讯


前言导读
手术机器人是一种先进的医疗设备,借助微创伤手术及相关底层技术的发展而发明。手术机器人被用于在高于人类能力的微创伤手术领域中实现高于人类能力的对手术器械的精准操控。手术机器人通常由手术控制台、配备机械臂的手术车及视像系统组成。外科医生坐在手术控制台,观看由放置在患者体内腔镜传输的手术区域三维影像,并操控机械臂的移动,以及该机械臂附带的手术器械及腔镜。机械臂模拟人类的手臂,为外科医生提供一系列模拟人体手腕的动作,同时过滤人手本身的震颤。
机器人手术系统是集多项现代高科技手段于一体的综合体,其用途广泛,在临床上外科上有大量的应用。外科医生可以远离手术台操纵机器进行手术,完全不同于传统的手术概念,在世界微创外科领域是当之无愧的革命性外科手术工具。
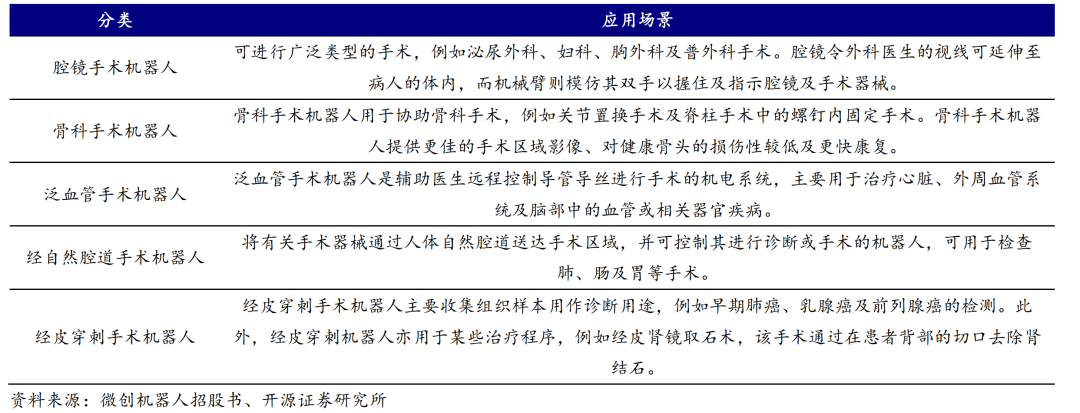
经过数十年发展,手术机器人现在主要用于五个快速增长的主要外科领域,其中的骨科、介入手术机器人是及其重要的一个版块。
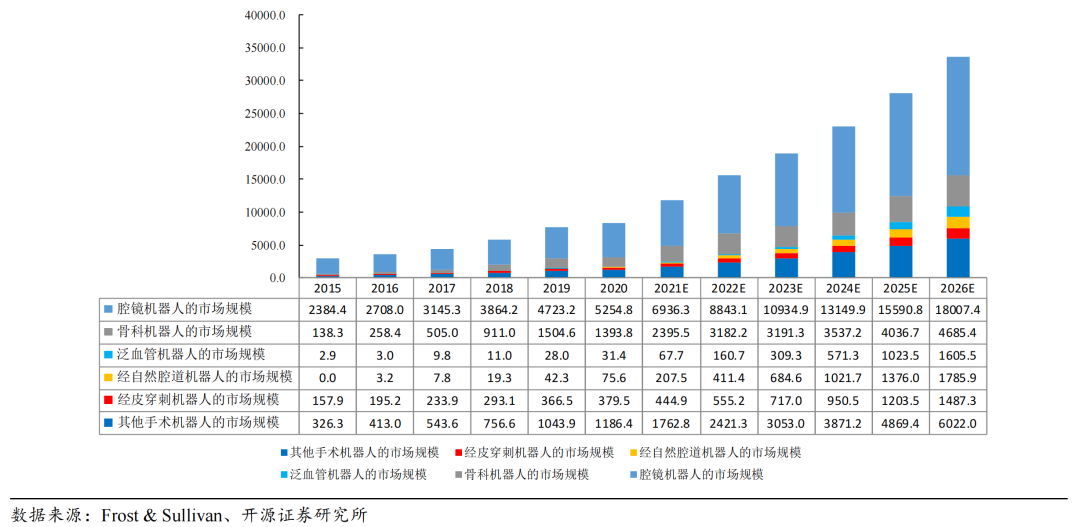
手术机器人市场概览
当前,随着人工智能、物联网等新科技的快速渗透,医疗健康正在与机器人全面融合,引领外科技术大变革。手术机器人行业迎来快速发展,赛道火热,备受资本青睐。
5.专利战,专利对于手术机器人而言十分重要,当然也是技术层面的演化,更是各大手术机器人厂商市场角力的重要武器,甚至是“终极核武”,规避设计风险、占据市场率都需要专利的辅助,达芬奇在腔镜机器人领域“叱咤风云”恰恰是得益于专利。
首款血管介入手术机器人获批上市
2023年3月13日,根据国家药监局通知,易度河北机器人科技有限公司的“脑血管介入手术辅助操作系统”获批NMPA,注册证编号为:国械注准20233010311。
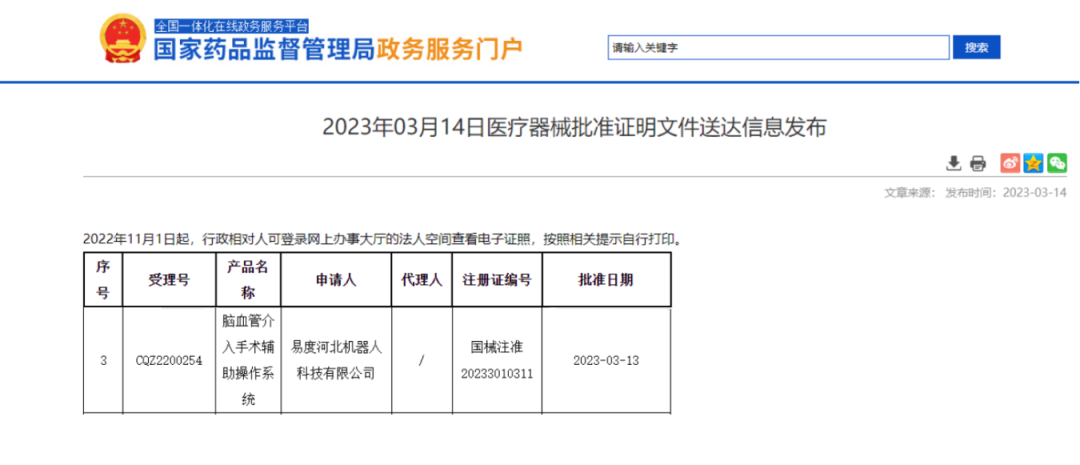
根据国家药品监督管理局医疗器械技术审评中心公布的审评报告获悉,该产品系注册申请人申请境内第三类医疗器械注册,该产品属于同品种首个产品。
易度河北机器人科技有限公司是北京万思医疗科技有限公司(以下简称“万思医疗”)的控股子公司,其自主研发的“脑血管介入手术辅助操作系统”(机器人)正式通过国家药品监督管理局(NMPA)三类医疗器械审查,获批上市意味着:成为国内首款获批的血管介入手术机器人,同时也是全球首款获批的神经血管介入手术机器人,打破了国际医疗巨头的技术垄断,填补了国内技术空白。
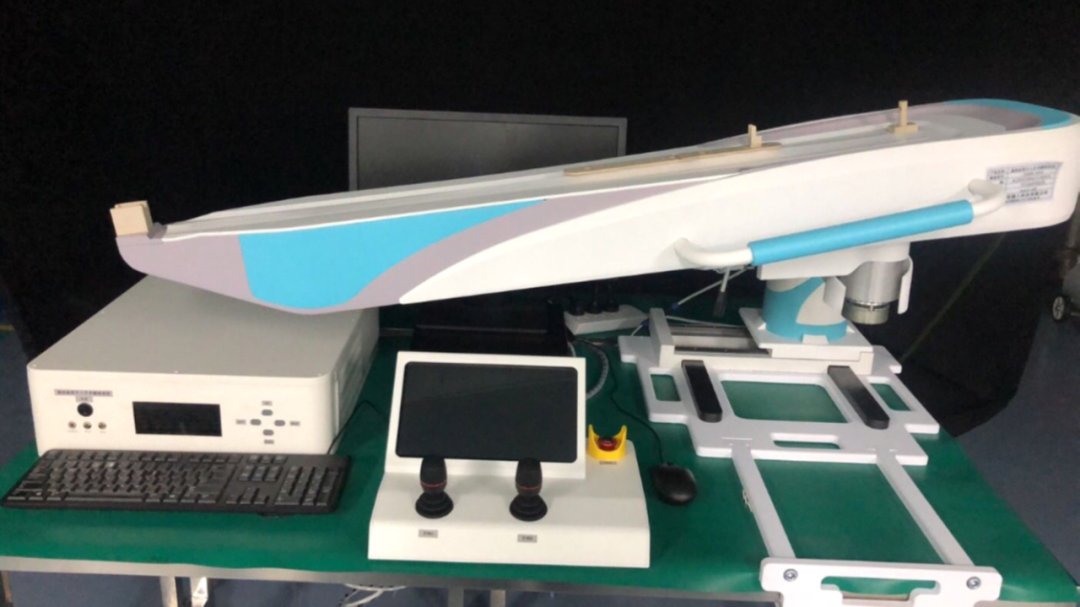
产品解析
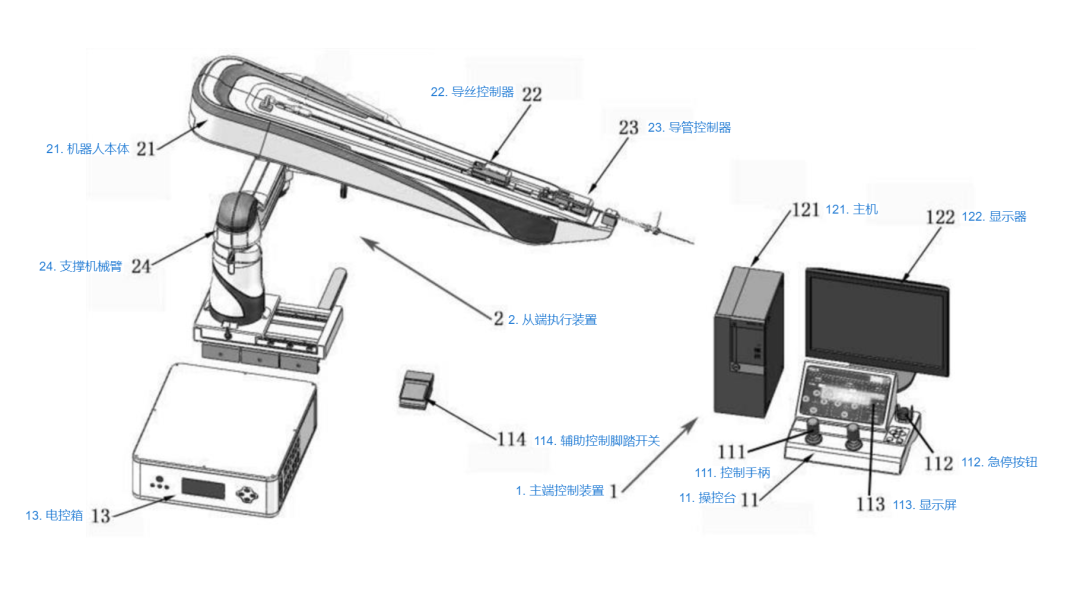
产品结构及组成:该产品由手术操作臂、控制柜、医生控制台、工作站、脚踏开关、电源线和一次性使用附件组成。一次性使用附件由导管 夹持器、导丝夹持器、导管辅助组件组成。
产品适用范围:该产品适用于需要进行经皮颅内全脑动脉造影检查手术的患者,预期在影像数据的引导下完成对造影导管和导丝的输送与后撤。产品需在医疗机构中使用,操作本设备应为具备副主任医师及以上职称且完成相应培训的医务人员。
工作原理:使用时将手术操作臂固定于手术床上并与手术床共同移动,导管夹持器、导丝夹持器、导管辅助组件安装在手术操作臂相 应卡槽中。通过操作者操作医生控制台的遥杆或触摸屏幕控制按键,发出操作指令,经连接的计算机软件转换,驱动控制柜中的运动控制卡,运动控制卡控制电机驱动部分,导管同步带和导丝同步带在相应的电机带动下前进或后撤,固定在导管同步带上的导管控制器和固定在导丝同步带上的导丝控制器跟随同步带前进或后撤。导管夹持器内的导管旋转齿轮和导丝夹持器内的导丝旋转齿轮也在相应电机带动下旋转。

专利技术解析
技术问题:现有微创血管介入手术机器人,多为科研院所和相关研发机构研制的理论样机,多为实现导管、导丝控制的功能。其产品不能完全模拟医生的操作动作,并且不能实现导管的长距离递送,进而造成操作精度低、手术效率低下、对医生的辅助程度低、存在一定的安全隐患。并且现有的手术机器人较为笨重、结构较为复杂、操作较为繁琐,不具有临床推广价值。。
有益效果:提供一种用于神经外科全脑动脉造影的手术机器人系统,采用导管、导丝独立控制方案,能够实现“倒手”、“碾丝”、“翻山”、“超选”等一系列神经介入常用的技术手法。同时,能够实现导管的长距离递送。该技术在临床应用中极具实用价值,该技术能够实现穿刺后手术机器人全程接管,真正意义上实现了将医生从床旁高辐射状态下解放出来的目的。另外,本实用新型的机器人系统具有稳定操作和反馈的功能,能够有效避免手抖的情况对病人的伤害,提高了手术的稳定性和安全性。
专利正接受无效挑战
易度河北机器人科技有限公司获批上市的全球首款脑血管介入手术辅助操作系统名为“VAS HERO血管介入手术机器人”,笔者注意到,其一件重要的技术专利正接受无效挑战,具体信息如下:
公告号:CN217090896U
发明名称:一种用于神经外科全脑动脉造影的手术机器人系统
无效状态:已完成口审
口审时间:2022-11-24
无效请求人:个人
无效请求人为个人,显然采用了“稻草人”无效方式,目前还无法明确实际无效方和专利权人之间的瓜葛和事由,因此无法发表评论,实际无效方如果也是一家手术机器人且其产品与该专利有冲突就十分值得玩味了,后续可持续关注。
值得一提的是,目前该涉及无效专利存在一案双申的发明专利,该发明专利申请人已通过优先审查的方式进审,目前已进入第二次审查意见的OA答复阶段。
关于易度河北机器人科技有限公司
北京万思医疗科技有限公司(“万思医疗”)聚焦于血管介入手术机器人及其耗材研发、生产和服务,致力于将血管介入领域的临床需求转化为机器人精准治疗平台,为医生和患者提供完整的血管介入创新解决方案。
易度河北机器人科技有限公司成立于2018年6月。注册资本1000万元,位于保定·中关村创新基地2栋B座1层。公司主导产品:“微创血管介入手术辅助系统”,是在科技部重点研发计划、863计划的支持下,由首都医科大学附属北京天坛医院神经介入科李佑祥教授团队研发的中国首个完成临床试验的同类产品。

